[IGEP v2][BusyBox] Créez votre distribution
- 22 11 2010
- Rédigé par PEB
- Écrire un Commentaire
Allez, c'est parti! Aujourd'hui, nous allons créer notre distribution embarquée pour l'IGEP. L'avantage sera majeur : nous intégrerons uniquement ce que nous voulons.

Dans cet article nous utiliserons un montage NFS et un serveur tftp pour faire nos tests. Je vous conseil donc très fortement de lire le post à ce sujet avant d'attaquer ce morceau ([IGEPv2] Kernel et Rootfs via tftp et nfs).
Nous utiliserons aussi Git, un gestionnaire de version. Si vous ne l'avez pas, installez le :
| $ apt-get install git |
Nous aurons aussi besoin de la librairie ncurses pour disposer d'une interface plus conviviale lors des menuconfig :
| $ apt-get install libncurses5-dev |
Préparation de notre environnement de travail
On va commencer par le plus simple, créer nos dossiers. Comme dans l'article précédent, nous allons suivre cette hiérarchie de dossier :
/srv/tftp/pebdev-dist/image-base/igep020/kernel/
/srv/nfs/pebdev-dist/image-base/igep020/rootfs/
Nous devrons utiliser le Bourne Shell, si vous êtes sur Debian :
| $ dpkg-reconfigure dash |
Chaîne de compilation croisée
Nous allons compiler sur notre PC des fichiers qui devront être exécutés sur une plate-forme ARM. Nous ne pouvons donc pas utiliser le compilateur gcc classique. Si nous le faisons, les fichiers pourront être exécutés uniquement sur une plate-forme i386 (un PC). En effet, le compilateur va transformer un code source en une suite d'instructions compréhensible par la plate-forme cible. Voila pourquoi nous devons utiliser un compilateur croisé, et dans notre cas, pour une cible ARM.
Notre choix se portera sur CodeSourcery G++ Lite. Ne vous posez pas de question sur le G++, c'est bien un compilateur C/C++ :)
Lien du projet G++ : CodeSourcery G++
Commencez par le télécharger :
- Allez sur la page de téléchargement.
- Sélectionnez GNU/Linux.
- Téléchargez la dernière version.
|
$ chmod +x arm-2010q1-202-arm-none-linux-gnueabi.bin $ mkdir /opt/codesourcery $ chown peb /opt/codesourcery $ ./arm-2010q1-202-arm-none-linux-gnueabi.bin |
Maintenant nous allons tester l'installation :
|
//On met à jour temporairement la variable PATH $ export PATH=/opt/codesourcery/bin:$PATH //Si vous souhaitez visualiser le résultat $ echo PATH //On regarde la version du compilateur $ arm-none-linux-gnueabi-gcc -v |
|
Si vous fermez le terminal, les modifications faites sur la variable PATH seront perdues, pensez à la remettre à jour. Sinon il existe une autre méthode plus rapide qui consiste à se loguer ainsi : $ su - peb Dans ce dernier cas, la variable sera ajoutée toute seule :) |
Compilation d'un noyau de base
Attention aux âmes sensibles... On est entre nous, donc pour la préparation du noyau pour l'IGEP, on va bourrinner et en faire le strict minimum :p
Par là, comprenez que nous allons récupérer les sources d'un noyau linux omap, mais qu'on va le compiler en utilisant une configuration déjà préparée. Nous toucherons éventuellement 2,3 paramètres, mais attention, pas plus! ;)
Allez, on télécharge ce noyau omap qu'ISEE nous propose pour l'IGEP (http://git.igep.es/). Pour cela on va cloner le repo avec git (attention ça prend du temps : ~20min pour moi.NE PAS ETRE EN ROOT) :
|
$ cd /srv/tftp/pebdev-dist/image-base/igep020/kernel/ $ git clone git://git.igep.es/pub/scm/linux-omap-2.6.git |
La première étape après le téléchargement, c'est de bien choisir le noyau que l'on souhaite :
|
$ cd linux-omap-2.6 //On regarde les différentes versions $ git tag //On choisi la dernière version $ git checkout -b v2.6.35.9-0 v2.6.35.9-0 |
Juste avant, pour la compilation croisée, on doit configurer 2 variables :
|
$ export ARCH=arm $ export CROSS_COMPILE=/opt/codesourcery/bin/arm-none-linux-gnueabi- |
Ensuite on charge la configuration pour notre carte. Pour cela on va chercher une configuration qui comporterait le mot igep :
|
$ cd linux-omap-2.6 $ make help | grep igep |
Et là on cherche dans le résultat un fichier de configuration qui pourrait aller pour notre carte igep... et ça tombe bien! il y a un fichier qui se nomme igep0020_defconfig! On va donc utiliser cette configuration :)
Maintenant on charge le fichier de configuration :
| $ make PREFIX=/opt/codesourcery/bin/arm-none-linux-gnueabi- igep0020_defconfig |
| $ make PREFIX=/opt/codesourcery/bin/arm-none-linux-gnueabi- menuconfig |
Donc c'est parti, on peut compiler (~45min) :
| $ make PREFIX=/opt/codesourcery/bin/arm-none-linux-gnueabi- uImage modules |
Voila, nous avons notre noyau. Il se nomme uImage et se trouve dans :
/srv/tftp/pebdev-dist/image-base/igep020/kernel/linux-omap-2.6/arch/arm/boot/.
A noter aussi, le mot modules va nous permettre de générer les drivers que l'on pourra ajouter à la rootfs par la suite.
Rootfs de base avec BusyBox
Nous avons un noyau, nous pouvons donc nous attaquer à la rootfs. Dans un premier temps, nous allons mettre le strict minimum de sorte à avoir un shell.
Pour cela il existe un petit outils assez pratique : BusyBox.
On le télécharge avec Git (NE PAS ETRE EN ROOT), faites bien attention au chemin cible :
|
$ cd /srv/nfs/pebdev-dist/image-base/igep020/ $ git clone git://git.busybox.net/busybox |
|
$ export ARCH=arm $ export CROSS_COMPILE=/opt/codesourcery/bin/arm-none-linux-gnueabi- |
|
$ cd busybox/ $ make PREFIX=/opt/codesourcery/bin/arm-none-linux-gnueabi- menuconfig |
Cochez la case (touche espace) : [*] Build BusyBox as a static bianry
Complétez aussi la ligne pour la cross-compilation : (/opt/codesourcery/bin/arm-none-linux-gnueabi-) Cross Compiler prefix
Nous allons aussi changer le chemin d'installation, pour cela revenez au menu principal, est allez dans BusyBox Settings > Installation Options.
Pour l'option BusyBox installation prefix configurez le chemin suivant ../rootfs/
Nous n'avons que cela à configurer. Faites donc Exit le nombre de fois qu'il faut pour quitter le menu. Lorsqu'on vous le demande, enregistrez la nouvelle configuration.
Tout est prêt, nous pouvons compiler!
| $ make PREFIX=/opt/codesourcery/bin/arm-none-linux-gnueabi- install |
Nous ajoutons les modules du noyau :
|
$ cd /srv/tftp/pebdev-dist/image-base/igep020/kernel/linux-omap-2.6 $ make PREFIX=/opt/codesourcery/bin/arm-none-linux-gnueabi- modules_install INSTALL_MOD_PATH=/srv/nfs/pebdev-dist/image-base/igep020/rootfs/ |
Et enfin, pour terminer, nous ajoutons les noeuds de périphériques statiques. Pour cela nous utiliserons un petit programme que nous allons commencer par télécharger :
| $ apt-get install makedev |
|
$ cd /srv/nfs/pebdev-dist/image-base/igep020/rootfs/ $ mkdir dev $ cd dev/ $ su root $ /sbin/MAKEDEV console $ /sbin/MAKEDEV fb0 $ /sbin/MAKEDEV null $ /sbin/MAKEDEV std $ /sbin/MAKEDEV tty $ /sbin/MAKEDEV ttyS $ /sbin/MAKEDEV hd |
Voila, notre rootfs est prête!
Test de la distribution par tftp et NFS
Si vous vous souvenez bien (cf. article précédent), la première chose à faire est de configurer le tftp et le nfs. Pour le tftp, nous n'avons rien à modifier sur le PC, par contre pour le nfs nous devons mettre à jour le chemin d'accès.
Pour cela on édite le fichier /etc/exports, on commente le chemin qui pointe vers la rootfs d'Android et on ajoute la ligne suivante :
|
# pebdev-dist image-base /srv/nfs/pebdev-dist/image-base/igep020/rootfs/ 192.168.254.254(rw,no_root_squash,no_subtree_check,sync) |
| $ /etc/init.d/nfs-kernel-server restart |
On pense aussi à configurer l'adresse IP du PC :
| $ ifconfig eth0 192.168.254.10 |
Maintenant on doit reconfigurer uboot. On branche la carte, on interrompt la séquence d'autoboot grâce à la liaison série (si cela ne vous parle pas, allez faire un tour sur l'article précédent), et on change les variables d'environnement qu'il faut :
|
//On change le nom de la distribution $ setenv distro 'pebdev-dist' //On change l'accès au noyau $ setenv nfs-boot 'if ping ${serverip}; then run nfs-bootargs; tftp 0x80000000 ${distro}/${project}/${machine}/kernel/linux-omap-2.6/arch/arm/boot/uImage; bootm; fi;' //On sauvegarde les variables $ saveenv |
Voila! Tout est prêt! On lance la commande run bootcmd à uboot pour voir le résultat...
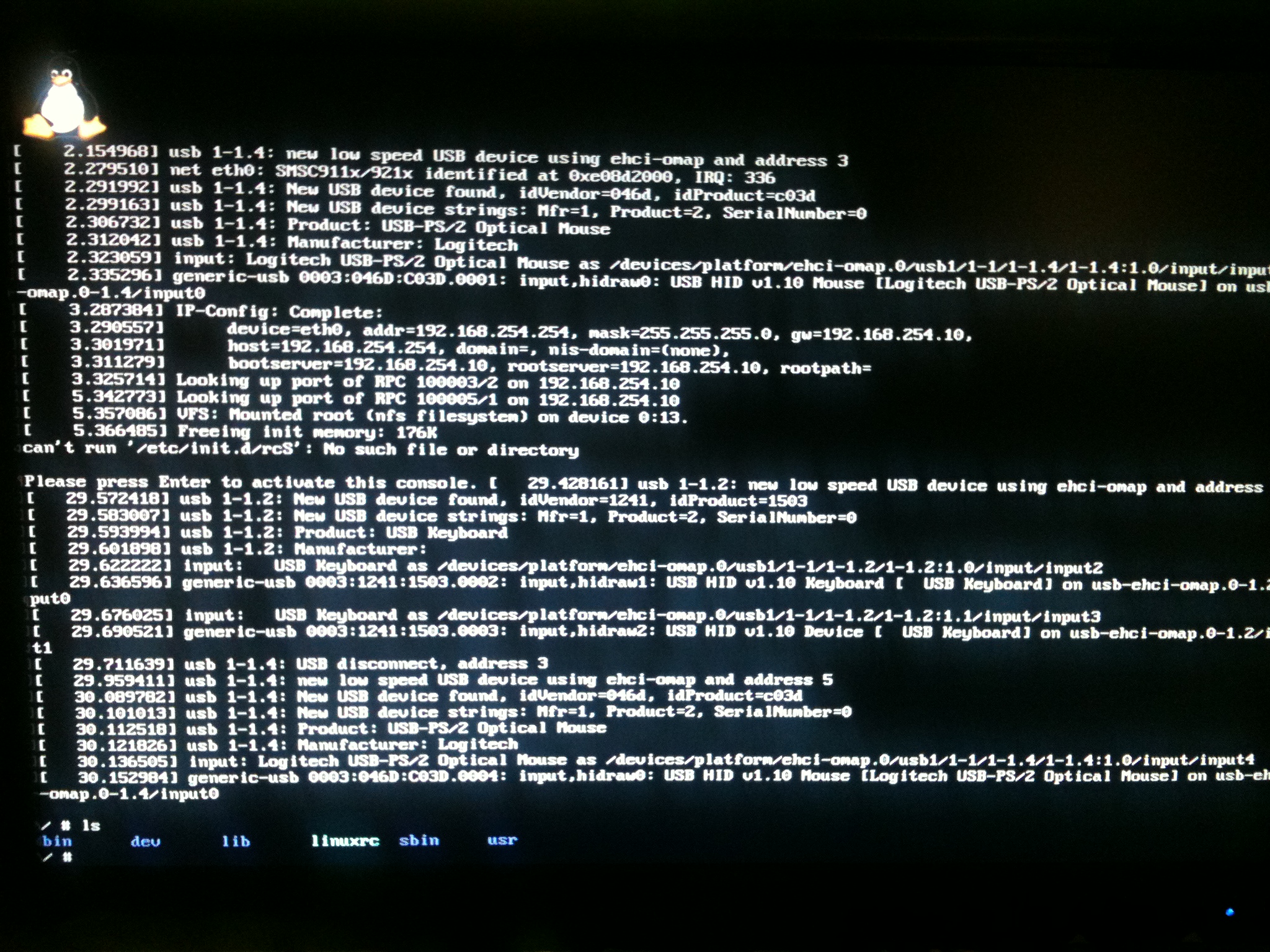
Si vous branchez un clavier et que vous appuyez sur une touche vous aurez accès au shell.
Nous verrons dans un prochain article comment rendre notre roofs plus conviviale.
Si vous avez des questions, comme d'habitude, n'hésitez pas à utiliser les com ci-dessous ;)
Vous avez de l’inspiration ! Vraiment merci
super quel plaisir de lire ce genre d' info, je partage cette page sur twitter
Web service slot 7 casino provider, play fun games, win unlimited money, the latest easy-to-break slots Easy
to win jackpot money. Get money immediately. Online games
that can be played at home. get real money There is no shortage of money to spend.
Funds are transferred into the account every day. Money into your
pocket 24 hours a day if you don't believe How to play games and how to get
money? We recommend slots that can be played for real money.
for you to try You can play games on this website.
Web gambling casino in our collection gta v casino heist payout and selection of good things to every customer
web casinos, 77 of our " Web Direct free" web that we collect as many games.
Where everyone has been playing a lot recently, there are PG SLOT
Spade Gaming and countless other camps. So that you can comfortably gamble on our website.
It's 100% safe to gamble 24 hours a day.